195-3077-5230
<blockquote id="oi6ug"></blockquote> <fieldset id="oi6ug"></fieldset>




TOF30飛行時間相機

產品介紹
光淪科技研發的TOF避障模塊,利用TOF三維測距原理,內嵌避障算法,可提供用戶進行二次開發。
1. 可實時輸出12位深度圖像和灰度圖像
2.高精度點云輸出
3.集成深度圖像處理與點云數據處理功能
4.內置微信數據處理與存儲
5.多接口連接,可以通過數據線、網絡或者WIFI進行實時交互
6. 前端可定制化智能程序
7. 可編程SDK
【特點】高幀率:60fps;車規級:采用符合車規級的芯片;遠距離:成像距離超5m;.邊緣計算能力(內置 ARM SoC );多種視覺功能SDK
【說明】采用麥立新的光傳感器與主處理芯片。搭載850nm波長高功率半導體激光光源。視場范圍大,探測距離遠
【參數】測量距離(m):0.4-4;測量精度(mm)5mm-1cm;視場角:48°;分辨率:320x240;幀率:60fps;接口:網口
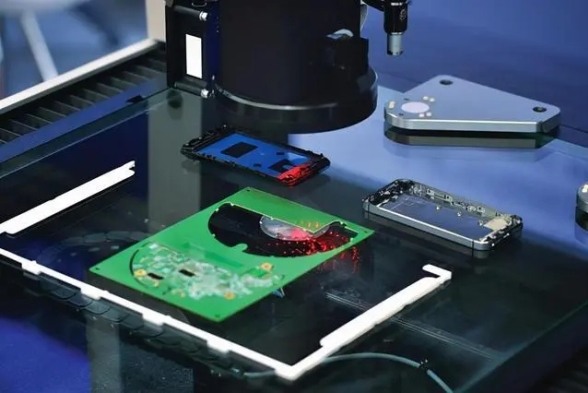
TOF避障模塊技術原理
TOF深度攝像頭利用光的飛行時間測量距離,能夠快速的計算深度信息,進行準確的三維測量,是實現機器人避障和室內定位與導航等應用的新型設備。
工業級飛行時間TOF圖像傳感器
VCSEL激光光源
4MP RGB攝像頭
邊緣計算平臺(RK3399 ARM SoC)
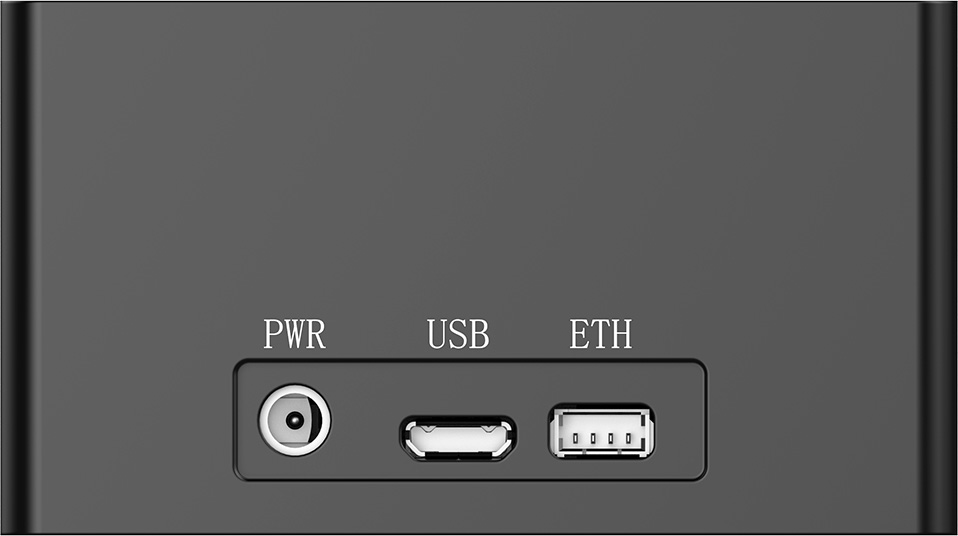
多種標準接口:網口,USB,WIFI,HDMI
相機規格
規格 | 參數 | |
TOF傳感器 | Imaging Array | 320 × 240 Array |
Field of view | 74.4°(H) x 59.3°(V) | |
Frame-rate | 12 … 60 fps | |
RGB圖像 | Imaging Array | 1920 x 1280,1080 x 720 |
Frame-rate | 30-120fps | |
色彩 | 彩色 | |
Illumination source | wavelength | 850 nm |
功率(W) | 1 or 2 | |
數量(顆) | 4 | |
Operating range | Up to 4 m | |
工作模式 | 多模 | |
系統 | Linux | |
功能 | 深度圖像,點云輸出,灰度圖,體積、距離測量,物體識別,移動偵測等等。 | |
應用場景 | 三維體積測量,空間定位,人臉識別,移動物體偵測與識別、主動避障等 | |
Connectivity | USB 2.0,USB 3.0,HDMI,LAN | |
供電 | Adaptor DC 12V/4A | |
Operating Temperature | 0℃ to 70℃ | |
外殼 | 鋁合金 | |
尺寸 | 106mm x 70mm x 51.6mm | |

AST-110主動雙目相機

AST-130主動雙目相機

DST-300/500結構光相機

TOF30飛行時間相機

3d視覺焊接(機器視覺引導焊接套管演示算法)
機器視覺系統中,這4種光源的選擇要領

工業智能機器視覺系統中,如何選擇相機(指標如下)
機器視覺系統中,采集圖像環節的6個側重點

關于工業機器視覺系統中,相機分辨率的介紹